Visibility-Based Robot Escort Algorithm
Abstract: In this work we present a solution to the visibility-
based escort problem, a problem closely related to the well-
researched pursuit-evasion problem. This novel problem entails
a single escort agent tasked with protecting and escorting one or
multiple VIP agents from line-of-sight threats in a 2-dimensional
environment. The algorithm takes as inputs a simply-connected
polygonal environment, the starting location of the escort, and a
goal location where the VIP agents should be safely moved to. The
solution comes in the form of a path that is not a sequence of exact
locations but rather a sequence of regions in which a VIP agent
can safely exist. We search for a solution using a breadth first
search across an information graph constructed from the environment.
The proposed method is capable of calculating non-trivial escort
agent strategies from various starting configurations in diverse
environments. Full Paper, Video Demo
Interceptor Missile Guidance through Deep Reinforcement Learning
Abstract: The following project details the application of reinforcement learning to develop a policy for interceptor missile guidance.
First the motivation and scope of the project are outlined. Then, the Markov Decision Process (MDP) is formulated and the related work
is discussed. The problem is formalized as an agent missile tracking and intercepting a target missile before it has the chance to impact
the ground. The implementation utilized an agent relative observation space and an advantage actor-critic algorithm. The reward
function was uniquely developed and showed the convergence to desirable policies even in the presence of disturbances to the target
missiles heading. Further, in some cases the agent could learn to account for states that resulted in a higher future probability of
interception due to the approach characteristics. Full Paper, Project Video
Comparing Performance of Parallel Maximal Independent Set Algorithms
Abstract: Many parallel algorithms exist for finding a maximal independent set (MIS) of
nodes in a graph. Despite the development of many parallel MIS algorithms, the
comparison of these algorithms has not been well investigated. The concept of
finding a MIS implies finding a large set of independent nodes is ideal. Given this
notion of larger MISs being better, it is beneficial to know which parallel algorithm
provides the largest MISs. Many other graph algorithms utilize MISs and could
benefit from obtaining larger sets of independent nodes. This work investigates
MIS sizes returned by parallel algorithms on a variety of graphs. Additionally, the
novel parallel algorithm, Degree One, is introduced and shows an increase in MIS
size ranging from 2.7% to 8% when compared to the next best MIS algorithm. The
algorithm contains a hyperparameter which allows for a trade off between MIS
size and the amount of parallel rounds needed. Full Paper
LLNL Projects
Computing Scholar Project
Worked with Dr. Roger Pearce and Dr. Trevor Steil on developing new graph centralities based on random spanning trees. The main
motivation was to find a centrality which could scale to large scale networks. Here is a short three minute
video from my Summer Slam presentation.
DSSI Project
My internship at Lawrence Livermore National Laboratory included being apart of the
Data Science Summer Institute 2022 Cohort. Myself and three other interns were tasked with applying
machine learning to create models capable of predicting ligand protein bonding with Covid-19. We developed two
prediction models. One trained on a tabular dataset comprised of characteristics of the protein. Here we applied a variety of
classifcation algorithms such as logistic regression, SVM, k-NN, and random forests. The second model was developed by taking
the spatial data of the protein and translating it to a graph. The atoms represented the nodes and the edges represented the
bonds. This enabled us to train a graph neural network (GNN) to create the prediction model. We were able to achieve an 82%
accuracy on the test dataset. The project was implmented using scikit-learn, Pytorch, and various other python libraries.
Walks: Senior Capstone Project
Walks is the name of the web application my fellow group members and I developed for our senior capstone project.
The app was made to give users the ability to give other users access to their whereabouts when going on hikes
or other outdoor adventures. Walks also allowed users to plan trips and invite other users to these trips.
We not only utilized phones as GPS devices for the app, but we also integrated physical GPS devices produced
by geoforce with our application. The web app was developed using React.js and Django
along with a large amount of 3rd party APIs. The mobile application was developed through Swift, and the
whole application was deployed on an AWS EC2 server. We implemented an agile like development cycle throughout the
project which included two week sprints and weekly meetings to discuss the project.
Full Software Manual
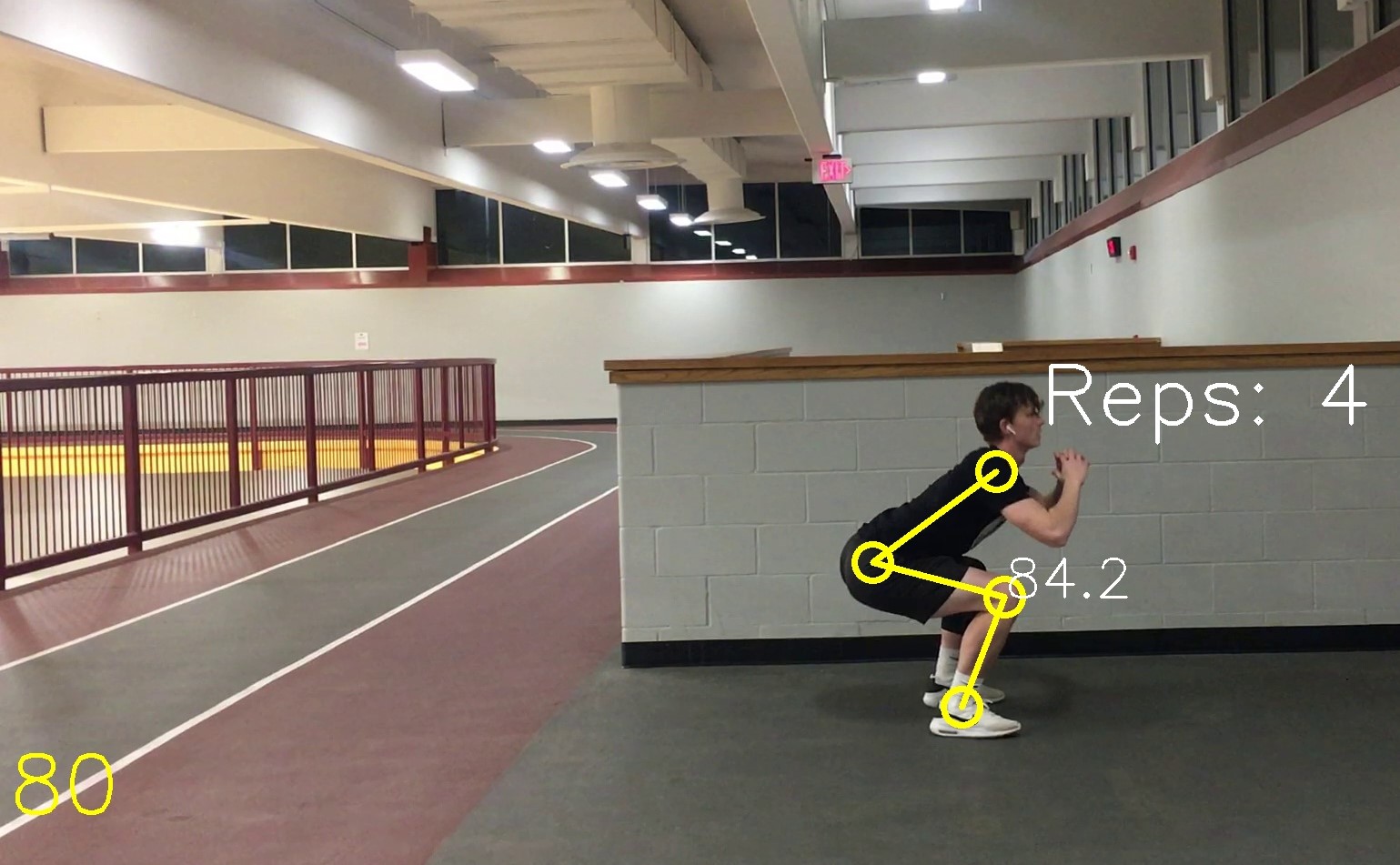
Exercise Evaluations Program
This project was the result of my time as a Kilgore Undergraduate Researcher.
I utilized OpenPose,
a pose estimation library which can extract the pose of a human body
from a video or image. The points generated by OpenPose were then used to analyze
an individuals movements throughout a workout. The squat was chosen as the exercise of
focus due to its ease of evaluation from a single angle. Additionally, I consulted with a biomechanics
professor on what to look for in improper squat form. I created a GUI to allow the user to easily
see where the system was detecting errors. After the analysis, the user is displayed with various
stats from the exercise such as average repetition time, number of repetitions, and overall grade
of the exercise. The program also maps the knee angle of each repetition to give the user the ability
to visually compare each movement in the set. Picture of GUI
{kind=link}